k-Wave丨光声成像仿真丨其他方式定义传感器、声源+定义异构介质并可视化(三)
本文介绍了使用二进制定义传感器、通过对角定义传感器以及加载外部图像映射三个方法,基于官方示例:均匀传播介质。并新增加了如何定义异构介质以及使用"kspaceFirstOrder2D"的内置绘图功能,基于官方示例:异构传播介质示例
本文是对上一篇博客的一些补充:
在第一到第二节中:介绍使用二进制定义传感器、通过对角定义传感器以及加载外部图像映射(将外部图像分配给初始压力分布,或理解为使用外部图像定义声源)三个方法,均基于官方的第一个示例:均匀传播介质(Example: Homogenous Propagation Medium)。
在第三节中:新增加了如何定义异构介质以及使用"kspaceFirstOrder2D"的内置绘图功能,基于官方示例:异构传播介质示例(Heterogeneous Propagation Medium Example)。
有兴趣的同好可以加企鹅群交流:937503951,任何科研相关问题都可以在群内交流,平常一起聊聊天、分享日常也是没问题的,欢迎~
目录
一、定义传感器
1.1 使用二进制定义传感器
sensor_x_pos = Nx/2; % [grid points]
sensor_y_pos = Ny/2; % [grid points]
sensor_radius = Nx/2 - 22; % [grid points]
sensor_arc_angle = 3*pi/2; % [radians]
sensor.mask = makeCircle(Nx, Ny, sensor_x_pos, sensor_y_pos, sensor_radius, sensor_arc_angle);sensor_x_pos = Nx/2; % x轴坐标:此时算得的x坐标为0
sensor_y_pos = Ny/2; % y轴坐标:y坐标也为0
sensor_radius = Nx/2 - 22; % 半径:128/2 - 22 = 42,42*0.1=4.2[mm]
sensor_arc_angle = 3*pi/2; % 弧度:3π/2 = 270°
sensor.mask = makeCircle(Nx, Ny, sensor_x_pos, sensor_y_pos, sensor_radius, sensor_arc_angle);
% 注意此时使用的是"makeCircle"函数,其参数要比"makeCartCircle"多
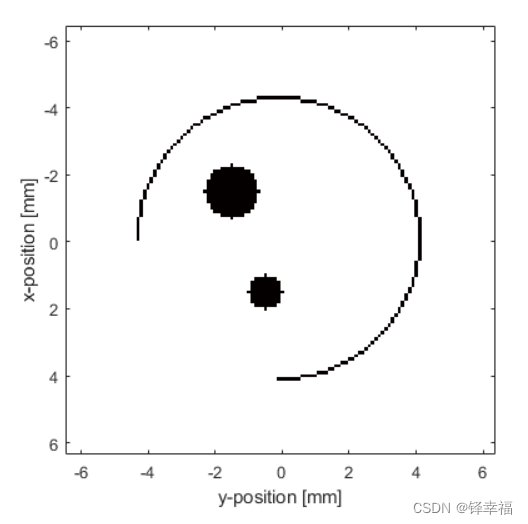
所绘制的传感器图如下,这时为一圈3/4圆的传感器,不再是用数量(50个)定义的传感器
1.2 通过对角定义传感器
% define the first rectangular sensor region by specifying the location of
% opposing corners
rect1_x_start = 25;
rect1_y_start = 31;
rect1_x_end = 30;
rect1_y_end = 50;
% define the second rectangular sensor region by specifying the location of
% opposing corners
rect2_x_start = 71;
rect2_y_start = 81;
rect2_x_end = 80;
rect2_y_end = 90;
% assign the list of opposing corners to the sensor mask
sensor.mask = [rect1_x_start, rect1_y_start, rect1_x_end, rect1_y_end;...
rect2_x_start, rect2_y_start, rect2_x_end, rect2_y_end].';rect1_x_start = 25; %x起始坐标:25*0.1=2.5[mm],-6.4+2.5=-3.9[mm]
rect1_y_start = 31; %y起始坐标:-3.3[mm]
rect1_x_end = 30; %x终止坐标:-3.4[mm]
rect1_y_end = 50; %y终止坐标:-1.4[mm]
% 上面所绘制的矩形为较扁的那一个,另一个矩形同理
% assign the list of opposing corners to the sensor mask
sensor.mask = [rect1_x_start, rect1_y_start, rect1_x_end, rect1_y_end;...
rect2_x_start, rect2_y_start, rect2_x_end, rect2_y_end].';
% sensor.mask也不再是用函数"makeCartCircle"或"makeCircle"赋值
% 这里是将对角列表(矩阵)分配给"sensor.mask",可以通过添加额外的列向量来指定多个矩形。
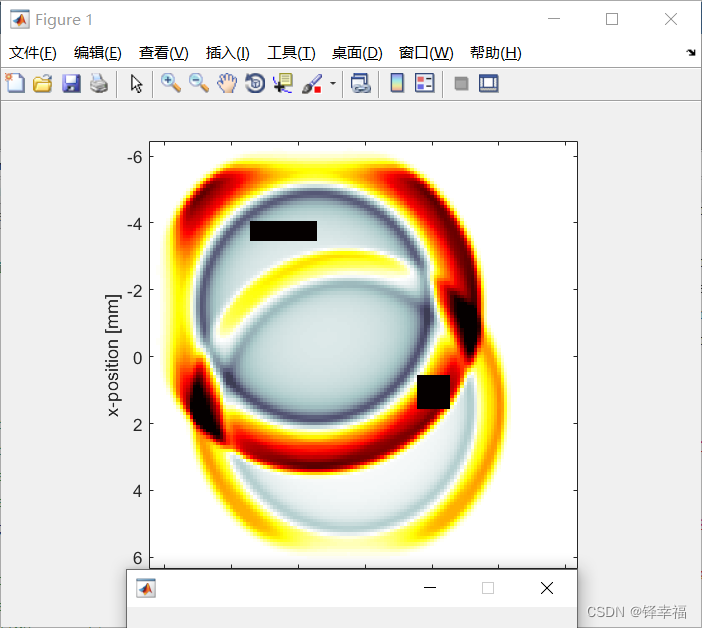
定义传感器所用的矩形区域见下图中黑色长方形:
1.3 注意事项
注:以上两种方法在输出数据、数据可视化时,与原官方示例中(均匀传播介质)的书写的程序有所不用,具体见官方示例中的解释。
二、加载外部图像映射
此部分演示了如何将外部图像分配给初始压力分布(或理解为:使用外部图像定义声源),以模拟二维均匀传播介质中的初始值问题。
原官方示例中的"kspaceFirstOrder2D"使用的初始压力分布"source.p0"只是一个填充了任意数值的二维矩阵。因此,任何数据都可以用来定义这种分布。
% load the initial pressure distribution from an image and scale the magnitude
p0_magnitude = 3;
p0 = p0_magnitude * loadImage('EXAMPLE_source_one.png');
% resize the image to match the size of the computational grid and assign
% to the source input structure
source.p0 = resize(p0, [Nx, Ny]);p0 = p0_magnitude * loadImage('EXAMPLE_source_one.png');
% 这里使用"loadImage"加载外部图像映射。
% 使用的外部图像名为"EXAMPLE_source_one.png",此图片和官方示例文件(.m)放在同一个目录下。
% 该函数将外部图像转换为矩阵,对颜色通道(用于彩色图像)求和,并将像素值从0缩放到1。
source.p0 = resize(p0, [Nx, Ny])
% 调整图像大小,以匹配计算网格的大小并分配给源输入结构。
% 原方法使用的是:source.p0 = disc_magnitude * makeDisc(Nx, Ny, disc_x_pos, disc_y_pos, disc_radius);
外部图像及此方式下的初始压力分布图如下:
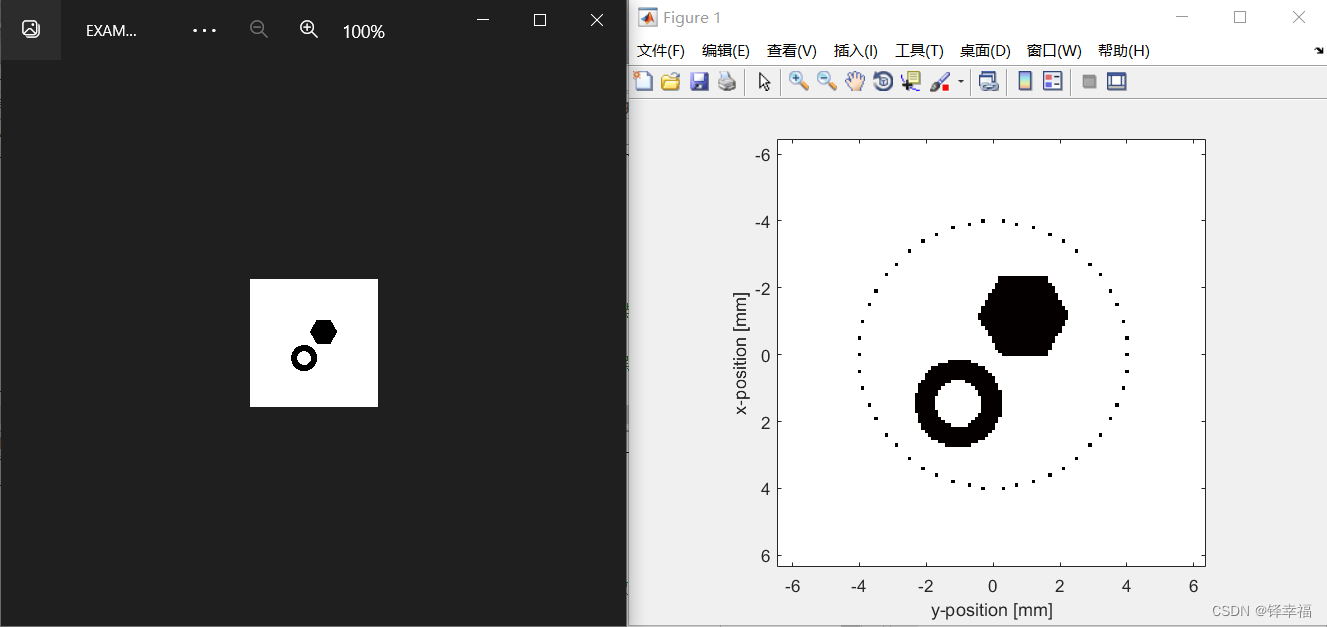
注:此方法在输出数据、数据可视化时,书写程序与原官方示例基本一致,无需过多调整。
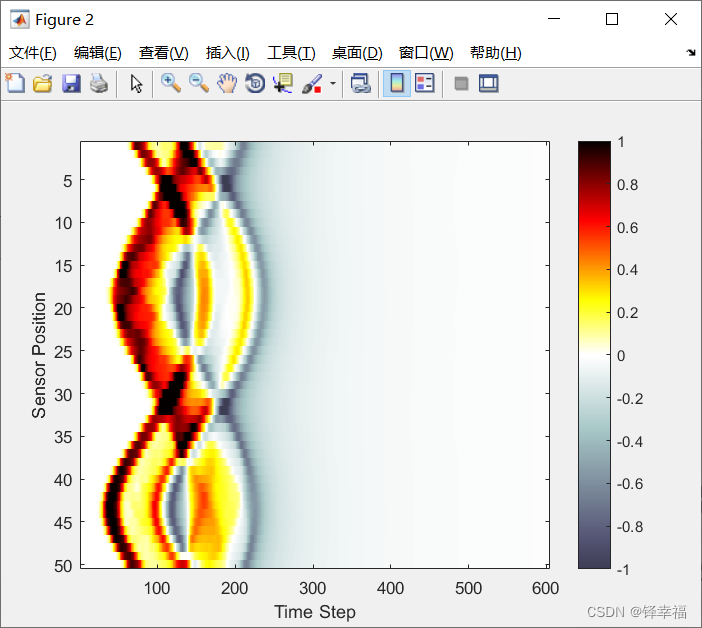
可视化结果如下:
三、定义异构介质并可视化
注:以下程序来自于官方示例:异构传播介质示例
3.1 定义异构介质
对于均匀传播介质,声速被指定为单位制单位的单个标量值。
如果传播介质是异质的,"sound_speed"和"medium.density"是作为与计算网格(即Nx行和Ny列)具有相同维度的矩阵给出的。
这些矩阵可以以几种方式创建:包括直接定义(如下所示)、从外部图像映射、或使用来自其他模拟或实验成像模式的空间或体积数据。
% define the properties of the propagation medium
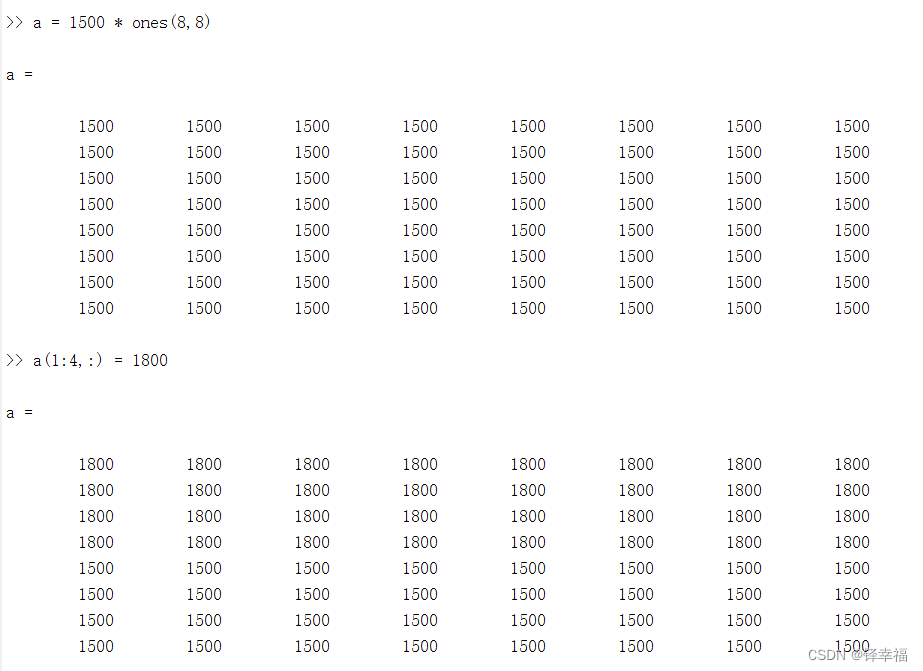
medium.sound_speed = 1500 * ones(Nx, Ny); % [m/s]
medium.sound_speed(1:Nx/2, :) = 1800; % [m/s]
medium.density = 1000 * ones(Nx, Ny); % [kg/m^3]
medium.density(:, Ny/4:Ny) = 1200; % [kg/m^3]medium.sound_speed = 1500 * ones(Nx, Ny); % [m/s]
% "ones"为创建全为1的矩阵,此时"medium.sound_speed"为128行128列全为1500的矩阵
medium.sound_speed(1:Nx/2, :) = 1800; % [m/s]
% 将上述矩阵,1到64行的全部列中的数字1500都变为1800
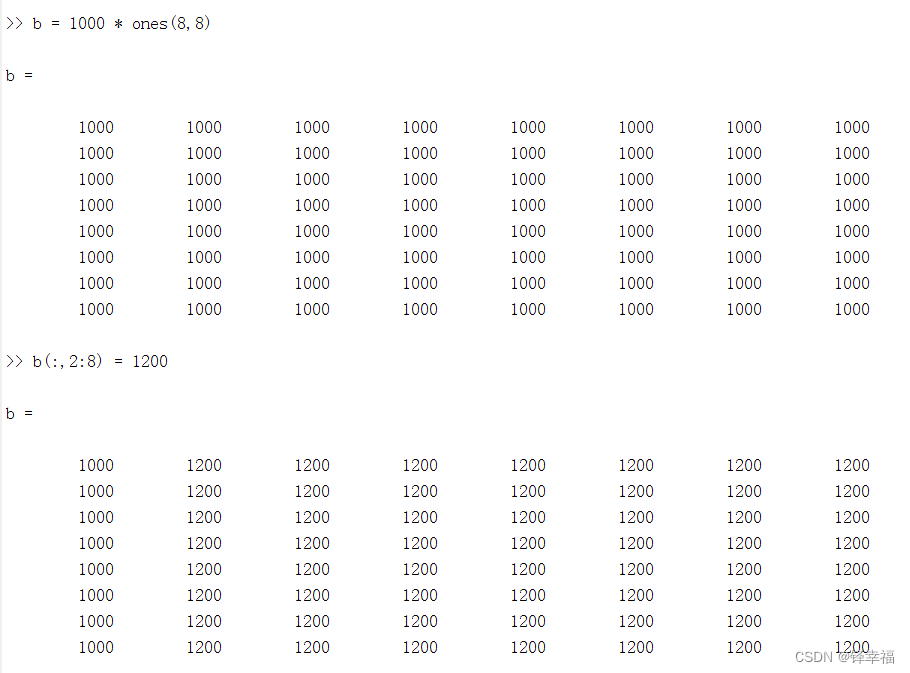
medium.density = 1000 * ones(Nx, Ny); % [kg/m^3]
% "medium.density"为128行128列全为1000的矩阵
medium.density(:, Ny/4:Ny) = 1200; % [kg/m^3]
% 将上述矩阵,32到128列的全部行中的数字1000都变为1200
下面给出小例子方便理解上述程序:
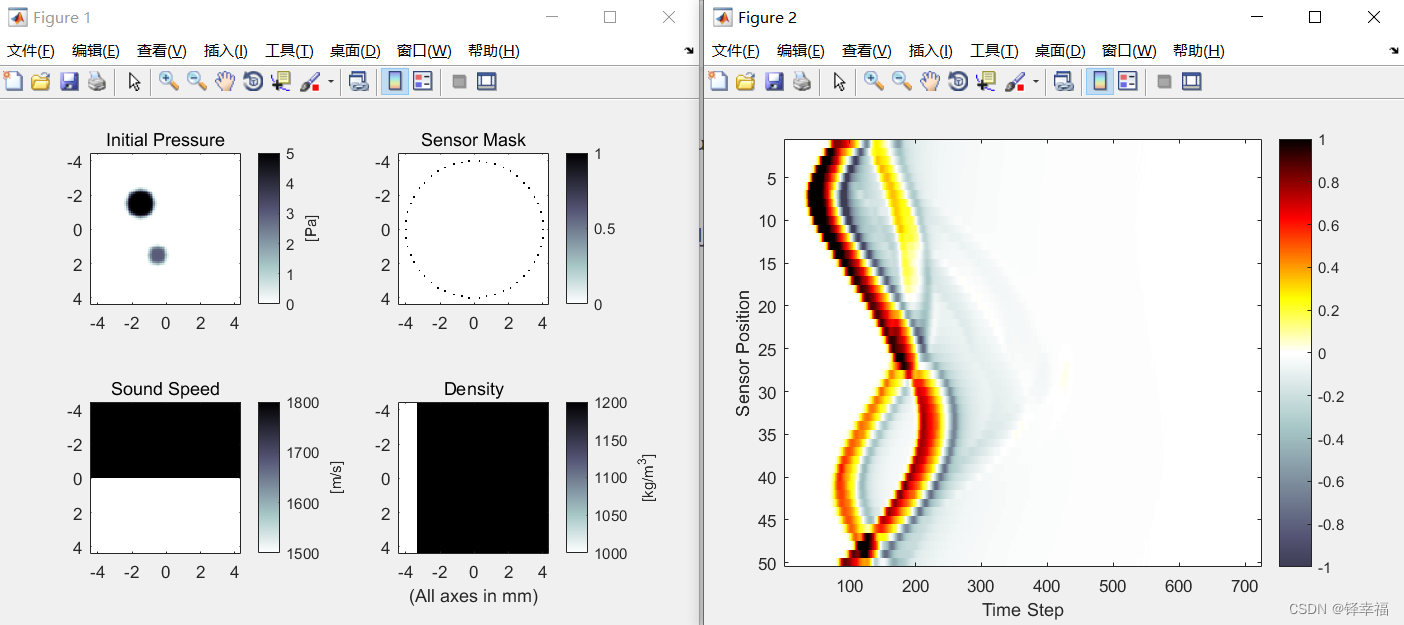
3.2 内置绘图功能
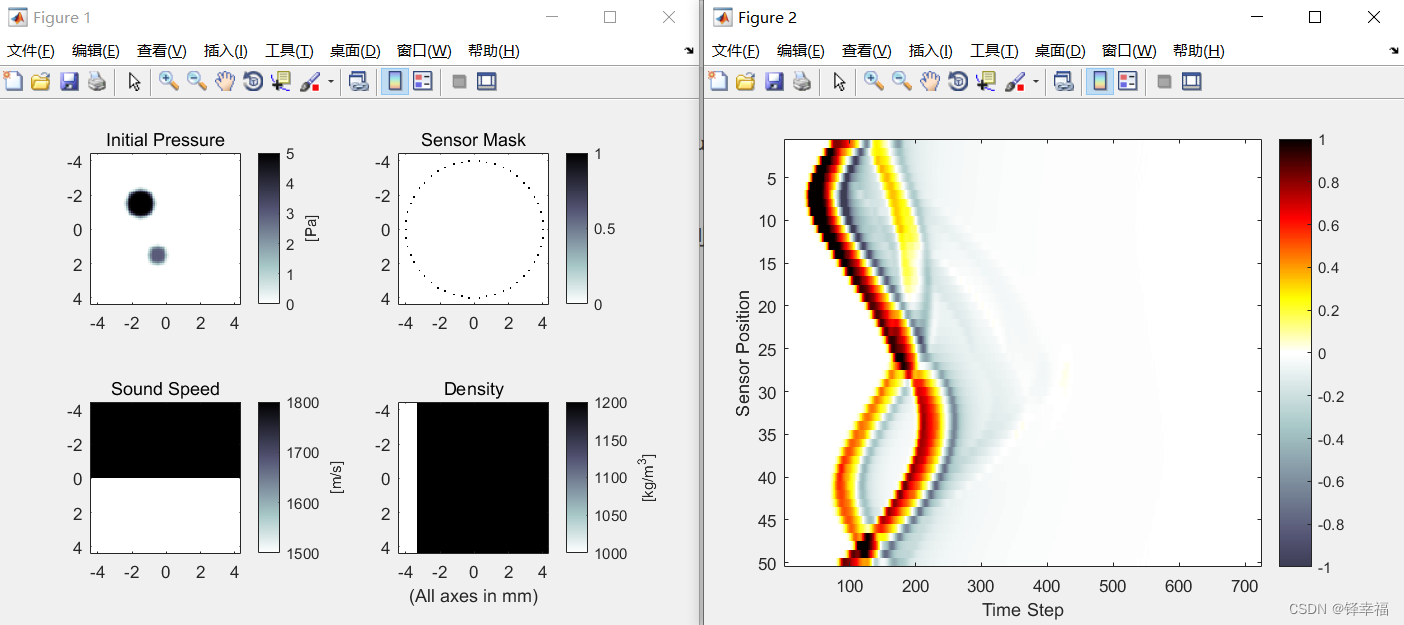
除了使用"imagesc"函数进行绘图外,还可以使用"kspaceFirstOrder2D"的内置绘图功能:
% run the simulation with optional inputs for plotting the simulation
% layout in addition to removing the PML from the display
sensor_data = kspaceFirstOrder2D(kgrid, medium, source, sensor, ...
'PlotLayout', true, 'PlotPML', false);通过输入“PlotLayout”设置为"true",即可使用"kspaceFirstOrder2D"的内置绘图功能;这里将"PlotPML"设置为"false",关闭PML(完美匹配层)的显示。
可视化结果如下:(与均匀传播介质相比,主波前的形状受到了扰动,并且还可以看到来自非均匀界面的弱反射)

永洪科技,致力于打造全球领先的数据技术厂商,具备从数据应用方案咨询、BI、AIGC智能分析、数字孪生、数据资产、数据治理、数据实施的端到端大数据价值服务能力。
更多推荐

 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)