大数据毕业设计opencv+dlib疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测 深度学习 机器学习 计算机毕业设计
大数据毕业设计opencv+dlib疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测 深度学习 机器学习 计算机毕业设计
·
博主介绍:✌全网粉丝100W+,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业毕业设计项目实战6年之久,选择我们就是选择放心、选择安心毕业✌
🍅由于篇幅限制,想要获取完整文章或者源码,或者代做,可以给我留言或者找我聊天。🍅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人 。
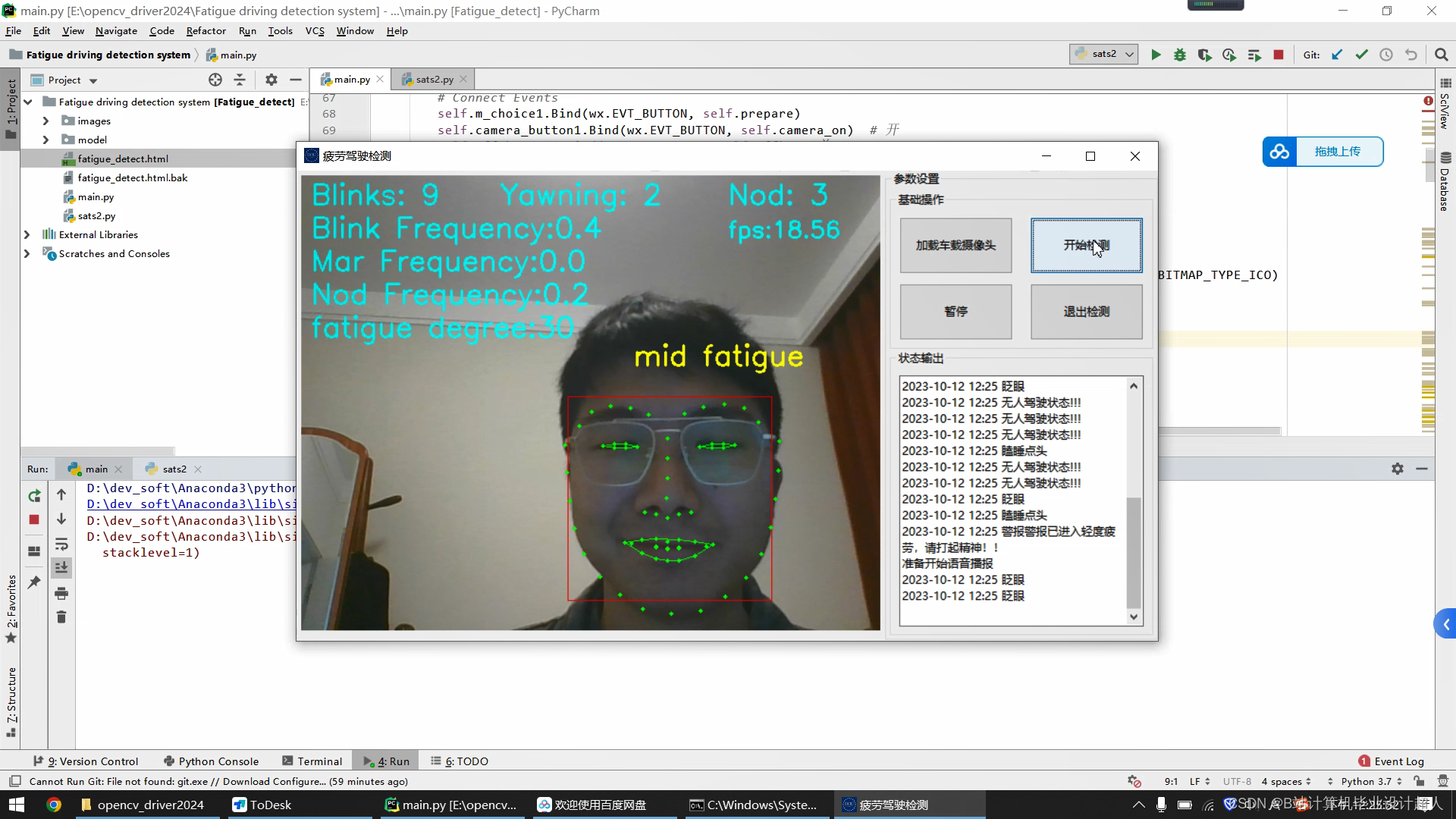
文章包含:项目选题 + 项目展示图片 (必看)
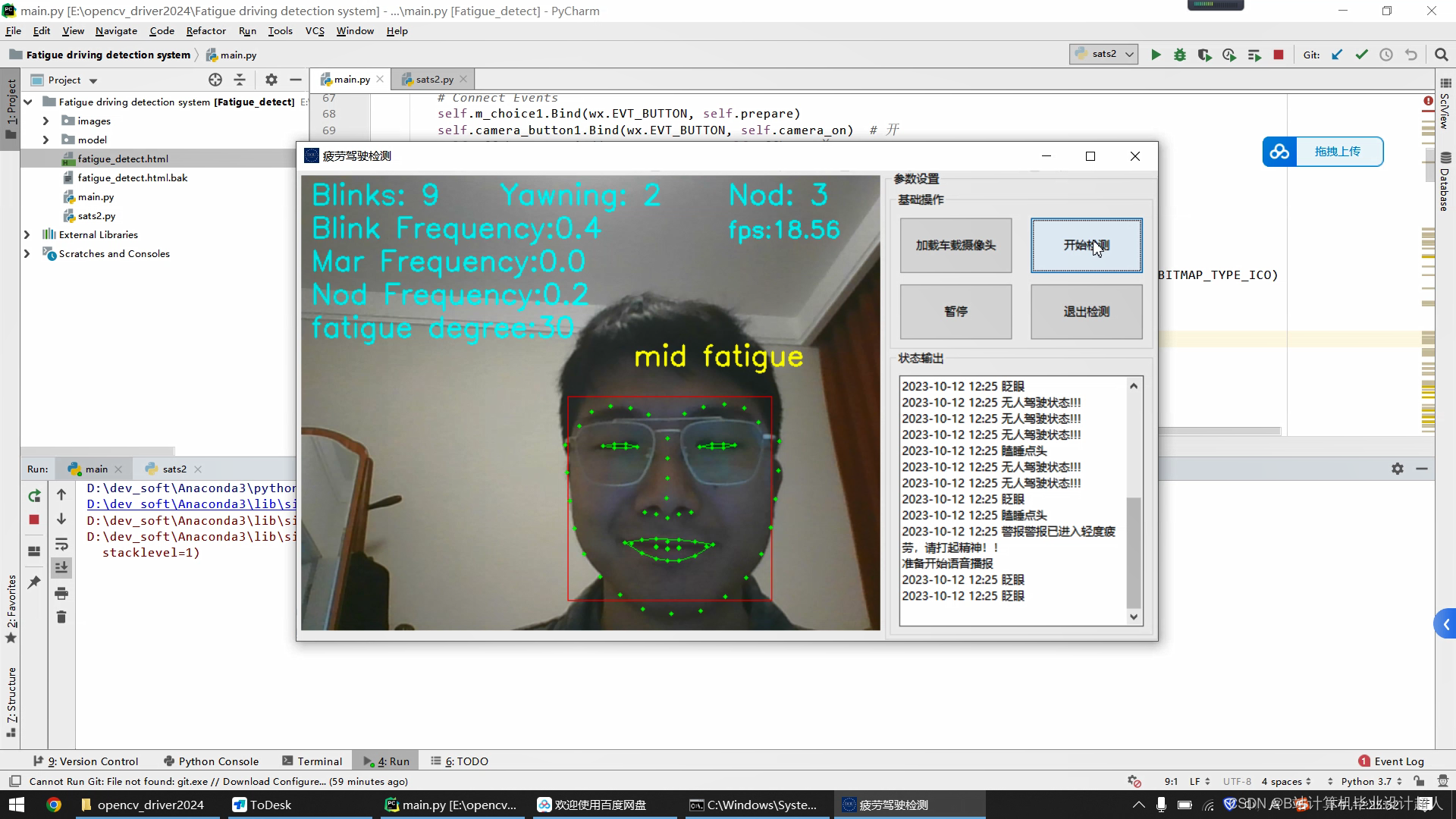
计算机毕业设计吊打导师opencv+dlib疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测 深度学习 机器学习 大数据
核心代码如下解析:
import numpy as np
class AutonomousVehicle:
def __init__(self, initial_position, initial_speed):
self.position = np.array(initial_position)
self.speed = initial_speed
self.direction = np.array([1, 0]) # 初始方向为x轴正方向
def perceive_environment(self, sensors_data):
# 根据传感器数据感知环境,返回障碍物信息和道路信息
# 这里简化处理,假设没有障碍物,道路平坦
obstacles = []
road_info = {'lane_width': 3.5, 'lane_center': np.array([0, 0])}
return obstacles, road_info
def plan_trajectory(self, obstacles, road_info):
# 根据环境信息规划轨迹
# 这里简化处理,假设车辆保持当前速度和方向行驶
target_position = self.position + self.speed * self.direction
return target_position
def control_vehicle(self, target_position):
# 控制车辆行驶到目标位置
# 这里简化处理,假设车辆立即到达目标位置
self.position = target_position
def run(self, sensors_data):
obstacles, road_info = self.perceive_environment(sensors_data)
target_position = self.plan_Trajectory(obstacles, road_info)
self.control_vehicle(target_position)
# 示例用法
initial_position = [0, 0]
initial_speed = 5 # 单位:m/s
av = AutonomousVehicle(initial_position, initial_speed)
# 假设传感器数据(这里简化处理,仅作为示例)
sensors_data = {'lidar': [[10, 10], [20, 20]], 'camera': [[5, 5], [15, 15]]}
# 运行自动驾驶系统
av.run(sensors_data)
# 输出车辆当前位置和速度
print("Current position:", av.position)
print("Current speed:", av.speed)
永洪科技,致力于打造全球领先的数据技术厂商,具备从数据应用方案咨询、BI、AIGC智能分析、数字孪生、数据资产、数据治理、数据实施的端到端大数据价值服务能力。
更多推荐


 1
1 0
0- 0



 已为社区贡献420条内容
已为社区贡献420条内容

所有评论(0)