Mamba原理详细推导、原理及其可视化代码实现
《Mamba模型原理及实现解析》摘要:本文系统介绍了Mamba模型的核心原理,该模型基于选择性状态空间模型(SSM)架构,通过引入选择机制解决了传统Transformer在长序列处理中的计算效率问题。文章首先分析Transformer的局限性,详细阐述状态空间模型的基本原理及其离散化处理方法,并对比了Mamba与RNN、Transformer的结构差异。通过代码实现和可视化演示,展示了Mamba在
目录
1.状态空间模型(State Space Model,SSM)的基本原理
2.利用Zero-order hold对SSM进行离散化处理
一、前言
1.Transformer并非完美
Transformer的输入窗口长度有限,且模型规模随输入序列长度平方次增长 。在处理长序列时,计算成本高。
Transformer VS. RNN
| 模型 | Transformer | RNN |
| 优点 | 构建灵活,易并行、易拓展 | 串行输入,理论上可以处理无限长序列 |
| 局限 | 并行输入,输入长度有限,模型规模随输入序列长度平方增长 | 训练长序时容易出现梯度消失或爆炸问题,且输入被过度压缩,模型能力受限 |
为了避免模型规模随序列长度二次增长,同时克服RNN的局限性,近年来研究者提出了多种RNN变体。其中基于选择状态空间模型(Selective State Space Model,SSSM)的Mamba模型(《Mamba: Linear-Time Sequence Modeling with Selective State Spaces》,原文:https://arxiv.org/pdf/2312.00752)引发了广泛关注。
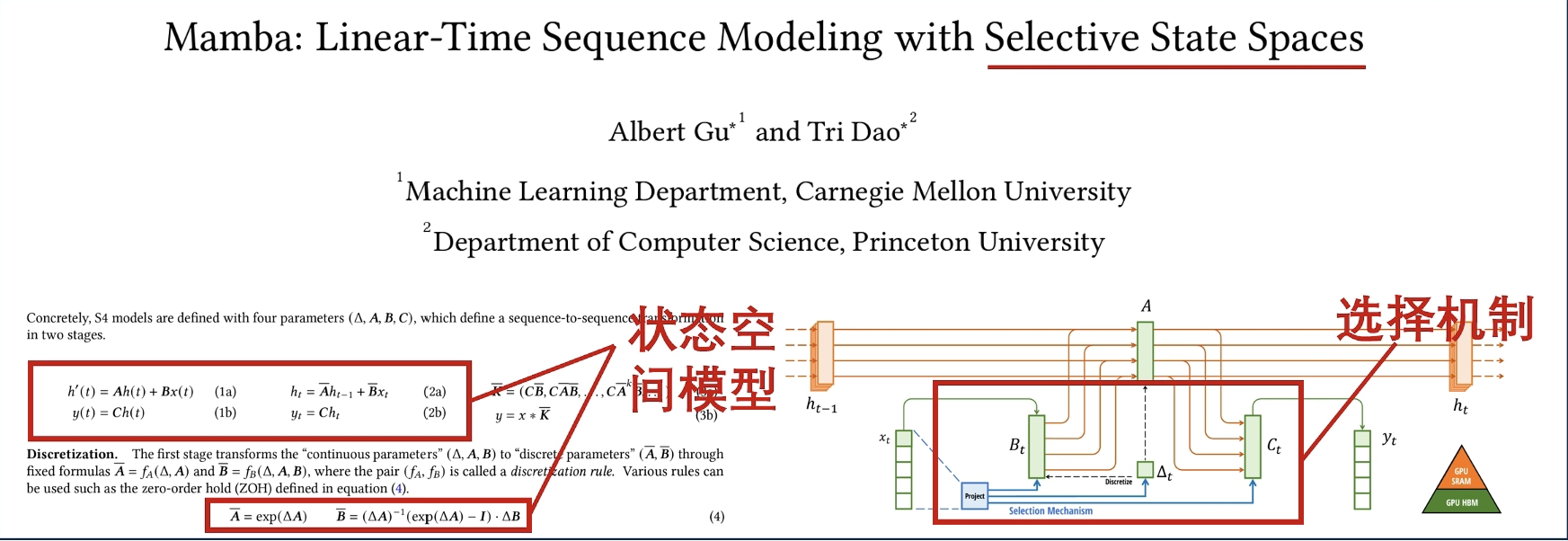
二、Mamba的原理
Mamba在状态空间模型(State Space Model,SSM)的基础上加入选择机制,确保其可以高效处理长序列,并且还可以达到与Transformer匹敌的模型能力。
Mamba的底层是Selective State Space Model,而状态空间模型(State Space Model)又是什么?State Space Model是控制里的知识,而这可能就是让很多人读Mamba论文时云里雾里的主要原因了吧。下面我们先来讲解State Space Model!
1.状态空间模型(State Space Model,SSM)的基本原理
SSM,是将一个n阶系统,用n个一阶等式进行矩阵表达,它实际上是一种空间转换的形态。
举个例子,在如图所示的弹簧振子系统中
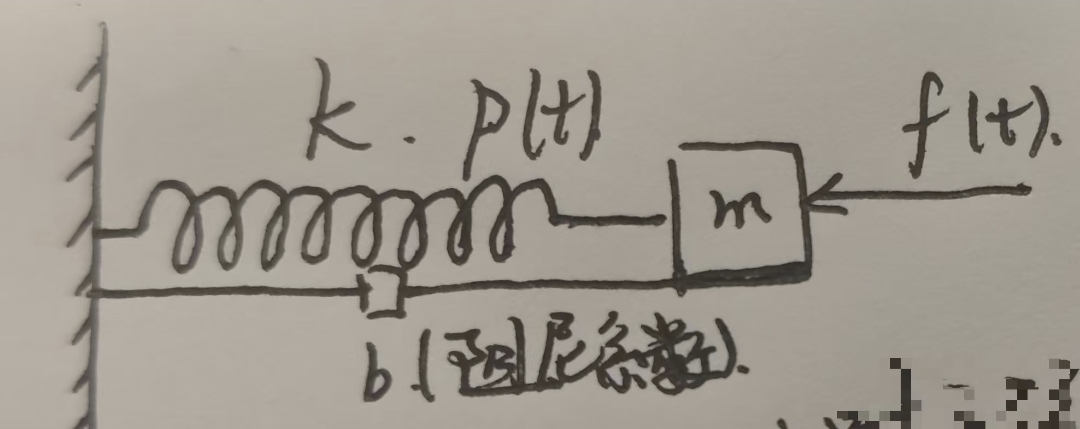
用表示对弹簧施加的外力,用
表示物块m产生的位移
那么,对于该弹簧振子系统,我们有
那也就是说,我们对这个弹簧振子系统施加了多少力,我们就能计算出物块的位置,而位置序列与NLP中的语言序列都是序列,我们是否也可以用这种办法来预测(表达、计算)呢?
好像从这个二阶ode来看,位置序列和token序列并没有多大联系,应该是不能的。那么,我们继续做变换
对于二阶方程,我们称其为二阶系统
令,
,那么很自然地有
,从而有
而这个方程中的矩阵,每一行都是一阶量
SSM实际上是描述系统的另一种形式,称,
为系统的状态
同理,输出,而在大模型领域,我们一般定义输出为
,输入为
令 ,
,
,
而这就是在Mamba论文中出现的第一个公式,State Space Model(SSM)
而SSM与语言序列最大的gap在于,语言序列是离散的,h(t)是连续变量,这并不能用于NLP,那么我们将上面的h(t)进行离散化处理。
2.利用Zero-order hold对SSM进行离散化处理
(1)Zero-order hold(零阶状态保持)
对于离散的点,如图所示
我们想要让他们连起来,采用Zero-order hold的效果是这样的:
(2)如何对SSM进行离散化呢?
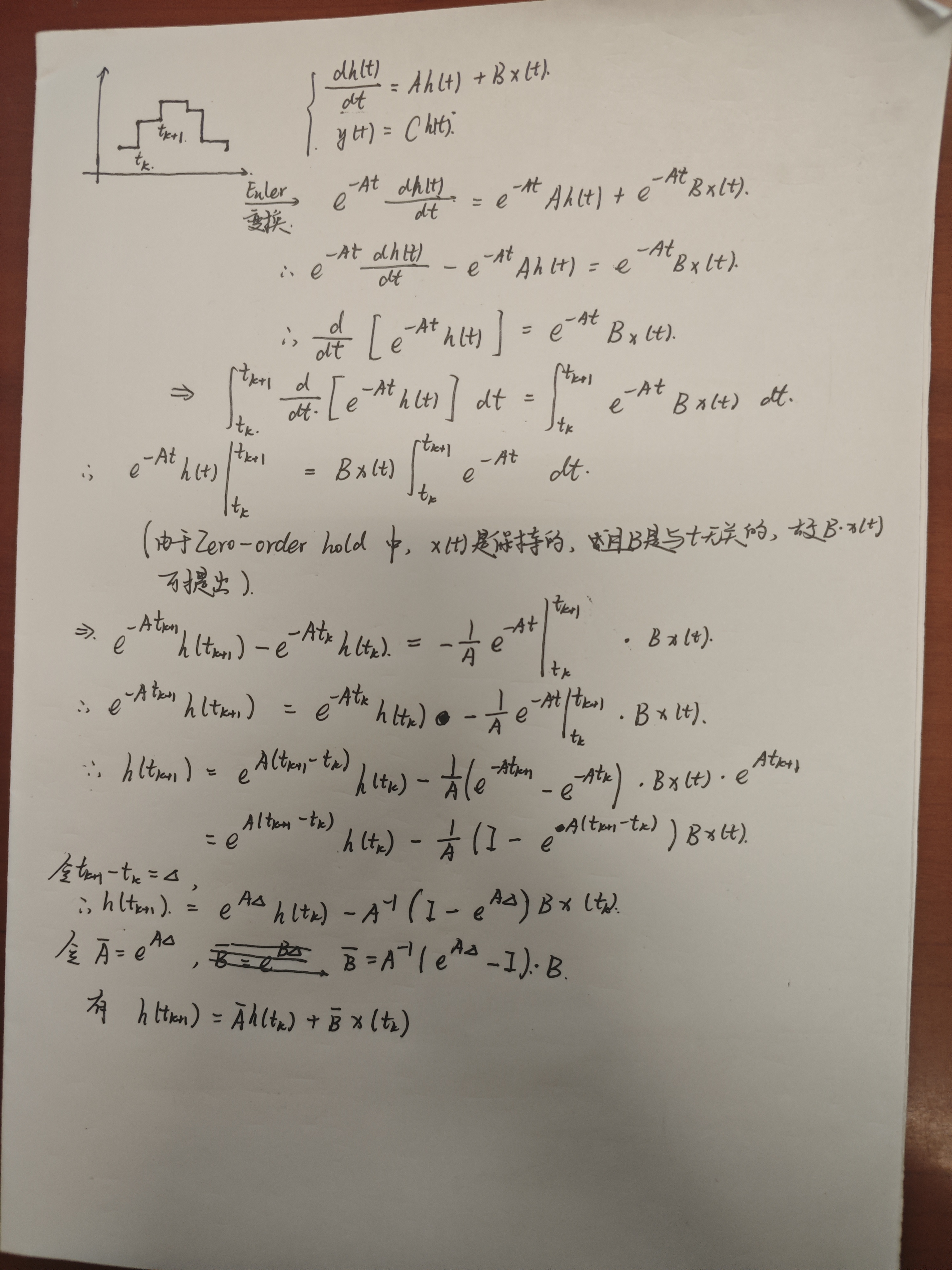
由此,我们得到了Mamba论文中的第二个公式,离散化处理。
对于之前的SSM是连续的,没有办法做NLP中的语言序列,那么我们离散化后的我们就可以当作是下一个token,即
,
。
3.直接使用SSM做语言序列预测的弊端
我们有推导过程可知,A和B都是固定的,及根据时间是不变的(线性时不变),那么这样就会导致模型的参数一直保持不变,就类似与之前的RNN,那么Mamba对此做出了改进。
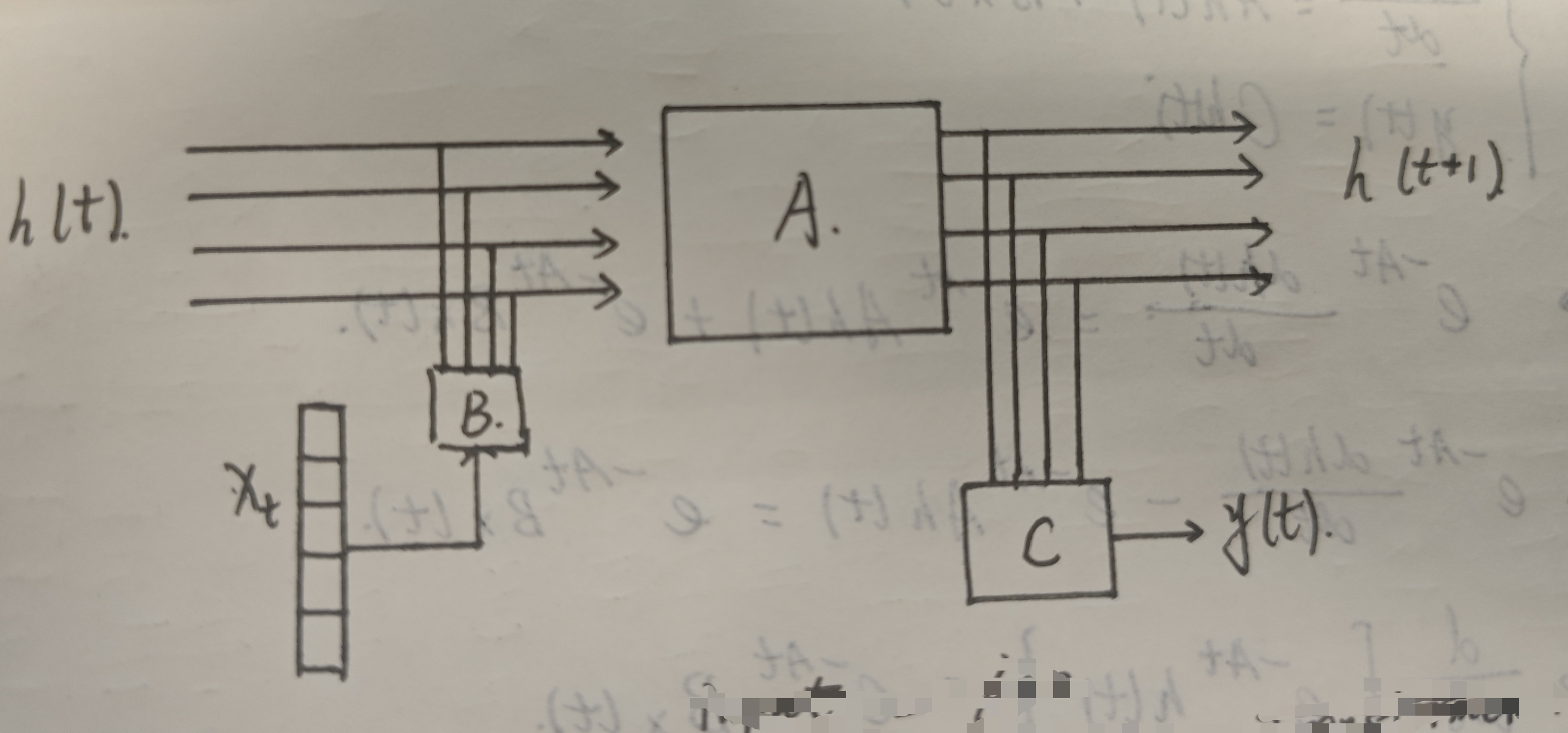
这就是之前使用SSM或者是RNN做语言序列处理时的模型结构图,我们假设input = 100,将SSM/RNN与Transformer两者进行对比
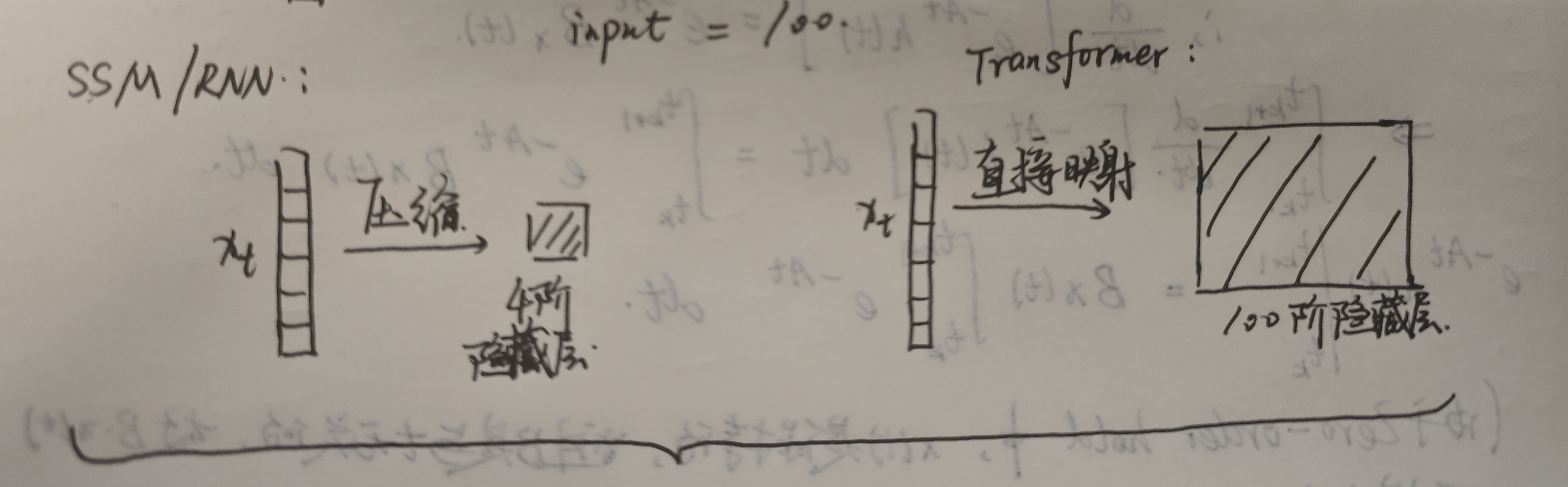
不难发现,SSM/RNN是直接将长序列压缩了,而这很可能会损失很多有价值的语义信息;而Transformer是不论输入维度有多大,直接进行映射,该例子中直接映射到100阶的隐藏层上,而SSM/RNN压缩到4阶隐藏层上,显然,就语义信息的完整度上,Transformer是完胜的,但是这也就造成了Transformer计算复杂度随序列长度呈现平方增长。
那么,我们能不能将两者折中呢?
训练出另一个模型,比SSM/RNN选择更多一些,也不是像Transformer那样,什么都要。而这个模型就是Mamba!
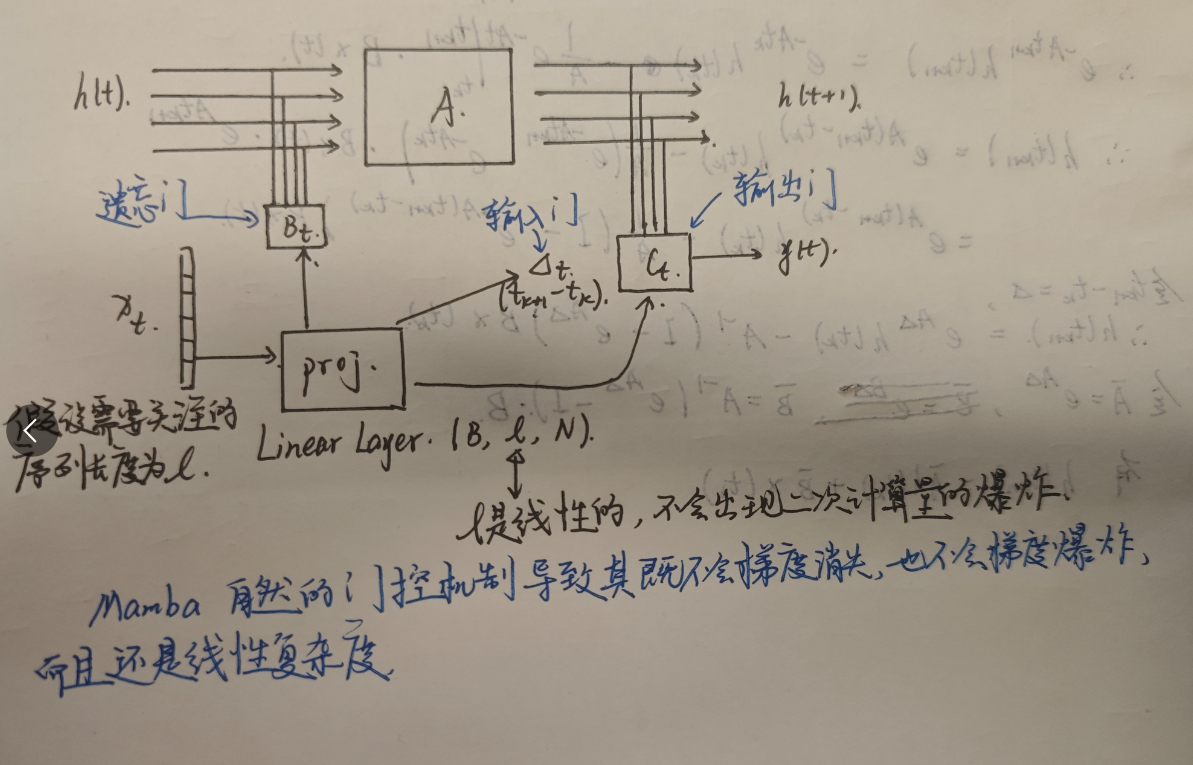
4.Mamba如何实现呢?
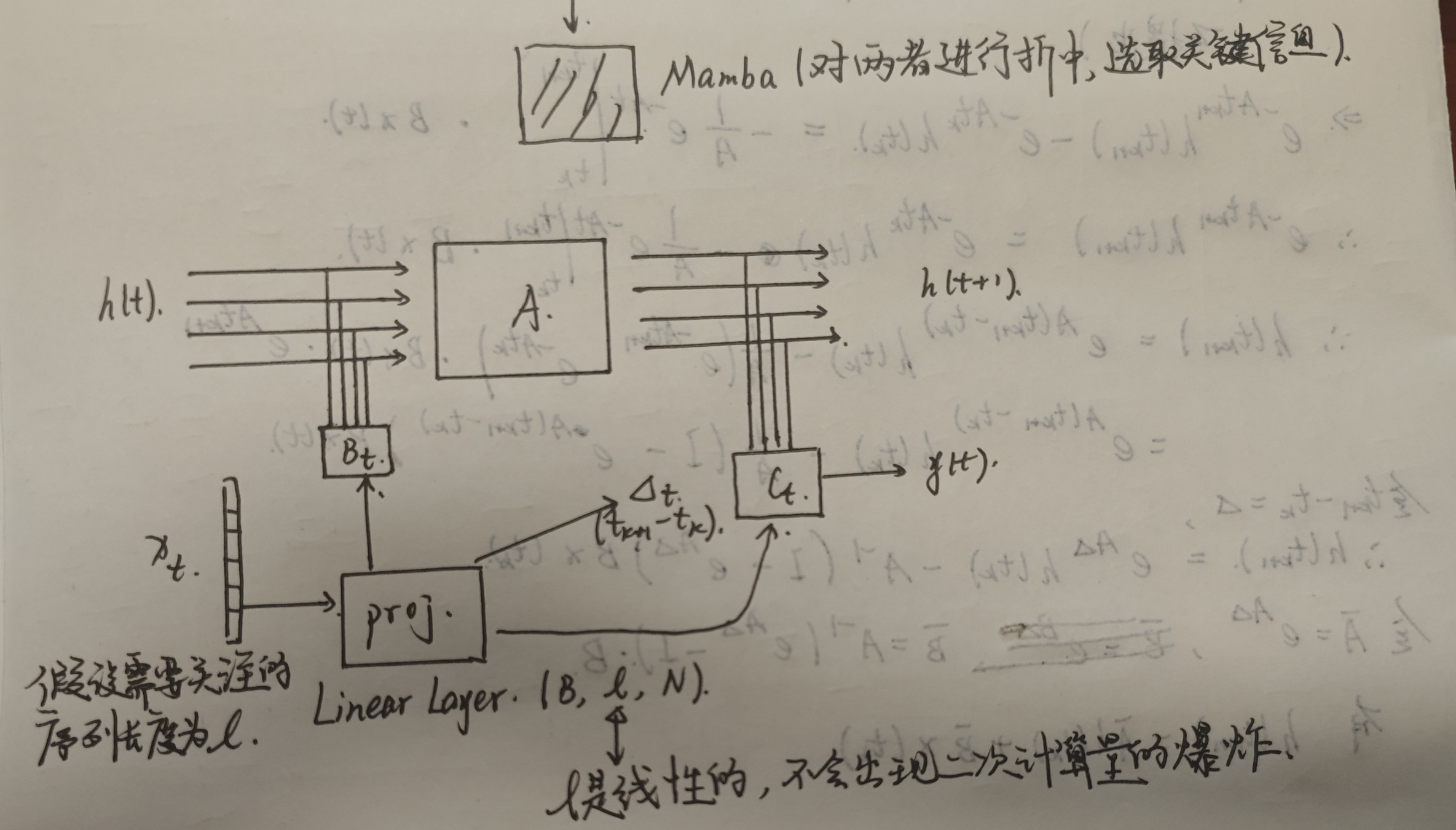
Mamba的做法如上图所示,而这种做法又与LSTM似曾相识
我们知道Mamba是从连续信号推导得来的,那么Mamba适合做前后有一定联系的预测,但对于前后联系不紧密或者根本没有联系的呢?
比如说在论文中是用基因做的实验,但是基因前后并没有什么关联,那么我们是否能将Mamba进行改进,创造出新的“Mamba”以适应前后并无联系呢?
三、Mamba原理代码及其可视化实现
"""
Mamba状态空间模型(SSM)实现
本代码实现了一个基于JAX的状态空间模型,用于模拟弹簧-质量-阻尼器系统
并生成动态可视化动画
"""
from functools import partial
import jax
import jax.numpy as np
from jax.numpy.linalg import inv
def example_mass(k, b, m):
"""
生成弹簧-质量-阻尼器系统的状态空间模型矩阵
参数:
k: 弹簧常数 (N/m)
b: 阻尼系数 (N·s/m)
m: 质量 (kg)
返回:
A: 状态转移矩阵 (2x2)
B: 输入矩阵 (2x1)
C: 输出矩阵 (1x2)
系统方程:
ẋ₁ = x₂ # 位置对时间的导数 = 速度
ẋ₂ = -(k/m)x₁ - (b/m)x₂ + u/m # 加速度方程 (牛顿第二定律)
"""
# 状态转移矩阵A: 描述系统内部动态
A = np.array([[0, 1], [-k/m, -b/m]])
# 输入矩阵B: 描述外部输入对状态的影响
B = np.array([[0], [1.0/m]])
# 输出矩阵C: 描述从状态到输出的映射
C = np.array([[1.0, 0]]) # 只观测位置x₁
return A, B, C
@jax.vmap
def example_force(t):
"""
生成示例输入力函数u(t)
使用JAX的vmap装饰器实现向量化计算
参数:
t: 时间点
返回:
力的大小,为正弦波与阶跃函数的乘积
"""
x = np.sin(10 * t) # 10Hz正弦波
return x * (x > 0.5) # 只保留大于0.5的部分
def discretize(A, B, C, step):
"""
将连续时间状态空间模型离散化
使用双线性变换(Bilinear Transform)方法
参数:
A, B, C: 连续时间系统矩阵
step: 离散化步长
返回:
Ab, Bb, Cb: 离散化后的系统矩阵
双线性变换公式:
s → (2/T) * (z-1)/(z+1)
其中T是采样时间
"""
# 单位矩阵
I = np.eye(A.shape[0])
# 计算双线性变换的中间矩阵
BL = inv(I - (step / 2.0) * A)
# 离散化状态转移矩阵
Ab = BL @ (I + (step / 2.0) * A)
# 离散化输入矩阵
Bb = (BL * step) @ B
# 输出矩阵保持不变
return Ab, Bb, C
def scan_SSM(Ab, Bb, Cb, u, x0):
"""
使用JAX的scan函数实现离散状态空间模型的递归计算
scan函数提供高效的前向传播,适合序列处理
参数:
Ab, Bb, Cb: 离散化系统矩阵
u: 输入序列 [L, 1]
x0: 初始状态
返回:
(final_state, outputs): 最终状态和输出序列
"""
def step(x_k_l, u_k):
"""
单步状态更新函数
参数:
x_k_l: 当前状态 x[k-1]
u_k: 当前输入 u[k]
返回:
x_k: 下一状态 x[k]
y_k: 当前输出 y[k]
"""
# 状态更新: x[k] = Ab * x[k-1] + Bb * u[k]
x_k = Ab @ x_k_l + Bb @ u_k
# 输出计算: y[k] = Cb * x[k]
y_k = Cb @ x_k
return x_k, y_k
# 使用JAX的scan函数进行高效的序列计算
return jax.lax.scan(step, x0, u)
def run_SSM(A, B, C, u):
"""
运行完整的状态空间模型仿真
参数:
A, B, C: 连续时间系统矩阵
u: 输入序列 [L]
返回:
y: 输出序列 [L] - 系统的位置响应
"""
L = u.shape[0] # 序列长度
N = A.shape[0] # 状态维度
# 根据序列长度确定离散化步长
# 假设总仿真时间为1秒,步长为1/L
Ab, Bb, Cb = discretize(A, B, C, step=1.0 / L)
# 运行递归计算
# 将输入重塑为列向量 [L, 1],初始状态为零向量
_, outputs = scan_SSM(Ab, Bb, Cb, u[:, np.newaxis], np.zeros((N,)))
# 返回输出序列
return outputs
def example_ssm():
"""
状态空间模型示例和动画演示
演示弹簧-质量-阻尼器系统对周期性力的响应
"""
# 创建状态空间模型
# k=40: 弹簧常数 (N/m), b=5: 阻尼系数 (N·s/m), m=1: 质量 (kg)
ssm = example_mass(k=40, b=5, m=1)
# 生成时间序列
L = 100 # 序列长度
step = 1.0 / L # 时间步长 (秒)
ks = np.arange(L) # 时间索引
# 生成输入力序列
u = example_force(ks * step) # 10Hz正弦波与阶跃函数的乘积
# 运行状态空间模型仿真
y = run_SSM(*ssm, u) # 计算系统响应
# 创建动画可视化
import matplotlib.pyplot as plt
from celluloid import Camera
plt.style.use('default')
# 创建3个子图
fig, (ax1, ax2, ax3) = plt.subplots(3, figsize=(10, 8))
camera = Camera(fig)
# 设置子图标题
ax1.set_title("输入力 $u_k$ (红色)")
ax2.set_title("位置响应 $y_k$ (蓝色)")
ax3.set_title("物体位置可视化")
# 隐藏x轴刻度以避免重叠
ax1.set_xticks([])
ax2.set_xticks([])
# 生成动画帧
print("正在生成动画帧...")
for k in range(0, L, 2): # 每2个时间步生成一帧
# 绘制累积的力和位置曲线
ax1.plot(ks[:k], u[:k], color="red", linewidth=2)
ax2.plot(ks[:k], y[:k], color="blue", linewidth=2)
# 使用箱线图可视化物体当前位置
# 创建一个表示物体边界的箱线图
ax3.boxplot(
[[y[k, 0] - 0.04, y[k, 0], y[k, 0] + 0.04]], # 物体的上下边界
showcaps=False, # 不显示端盖
whis=False, # 不显示须线
vert=False, # 水平方向
widths=10, # 箱体宽度
)
# 设置y轴范围以保持可视化稳定
ax3.set_ylim(-0.1, 0.1)
# 拍摄当前帧
camera.snap()
# 创建动画
print("正在创建动画...")
anim = camera.animate(interval=100) # 每100ms更新一帧
# 保存动画为GIF文件
print("正在保存动画文件...")
anim.save("Mamba/image/line.gif", dpi=150, writer="pillow")
print("动画文件保存完成!")
# 打印仿真结果统计
print(f"\n仿真结果统计:")
print(f"最终位置: {y[-1, 0]:.4f}")
print(f"最大位置: {np.max(y[:, 0]):.4f}")
print(f"最小位置: {np.min(y[:, 0]):.4f}")
print(f"位置变化范围: {np.max(y[:, 0]) - np.min(y[:, 0]):.4f}")
if __name__ == "__main__":
"""
主程序入口
运行状态空间模型示例并生成动画
"""
print("=" * 50)
print("Mamba状态空间模型(SSM)仿真")
print("=" * 50)
print("系统参数:")
print("- 弹簧常数 k = 40 N/m")
print("- 阻尼系数 b = 5 N·s/m")
print("- 质量 m = 1 kg")
print("- 输入: 10Hz正弦波与阶跃函数")
print("=" * 50)
example_ssm()可视化图像
四、致谢
由于本人水平有限,对Mamba的理解可能有失偏颇,希望各位小伙伴能够积极指出!

永洪科技,致力于打造全球领先的数据技术厂商,具备从数据应用方案咨询、BI、AIGC智能分析、数字孪生、数据资产、数据治理、数据实施的端到端大数据价值服务能力。
更多推荐

 29
29 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)